Cabe aclarar que así como cada organismo es único, cada cirugía también lo es, por tanto la construcción de las trayectorias se realiza para un caso particular, sin embargo, la variabilidad de los movimientos y tareas que debe realizar el robot no difiere demasiado de un caso a otro.
2.2 CONSTRUCCION DE LAS CONSIGNAS PARA LA COLECISTECTOMIA LAPAROSCOPICA
A continuación se realiza una descripción detallada, paso a paso de la técnica quirúrgica necesaria para la colecistectomía laparoscópica, y posteriormente el método de trabajo en Blender para la obtención de cada consigna y los resultados en Matlab.
2.2.1 Técnica quirúrgica.
Generalmente el procedimiento quirúrgico se divide en cinco pasos o etapas.
1. Exponer conducto y arteria císticos.
2. Disección (limpieza de tejido) del triangulo de Calot (triángulo formado entre los conductos).
3. Seccionar (cortar) conducto y arteria císticos.
4. Disección de vesícula del lecho hepático.
5. Extracción de vesícula.
Para ejecutar estas tareas debe tenerse en cuenta que se dispone de un brazo robótico el cual realizará las consignas obtenidas del análisis del instrumento que se introduce por la incisión marcada por la letra D (Figura 2-2) cuyo diámetro es 10 mm, la cual es una restricción que tiene el robot para realizar estos movimientos.
Cabe aclarar que tanto el manejo de la cámara A, como las funciones de los instrumentos de las incisiones B y C serán hechas por auxiliares o asistentes humanos.
Se realizará la construcción de las consignas para las etapas 2,3 y 4 por que como se analizará más adelante la primera y última etapa son realizadas por los auxiliares y sus movimientos no generan información suficiente para su construcción. A continuación se analizarán las etapas de la cirugía.

Figura 2-2: Disposición de los trocares.
2.2.1.1 Exposición del conducto y arteria císticos.
Para exponer el conducto y arteria císticos se utiliza un grasper (ver sección 1.3.3.3) para agarrar la vesícula y traccionar (empujar), hacia arriba y en dirección del hombro derecho del paciente. En este momento es posible identificar una región de la vesícula llamada Bolsa de Hartman, nombre dado al segmento de vesícula que está junto a los conductos, zona en la cual también se genera tracción. De esta manera se expone el conducto y la arteria císticos, es importante que la tracción que se genera en la vesícula se mantenga constante, con el fin de no perder la visibilidad en ningún momento del procedimiento. Es precisamente por esta razón que no se genera movimiento drástico durante el procedimiento que justifique la construcción de consignas (Figura 2-3).

Figura 2-3: Exposición del conducto y arteria císticos[21]
2.2.1.2 Disección del triángulo de Calot.
Esta etapa, básicamente consiste en revelar la ubicación de los conductos para posteriormente dar paso a la sección (corte) de cado uno de ellos. Normalmente estos conductos forman un triangulo llamado Calot. La etapa inicia creando una ventana hacia el conducto cístico (es decir, el espacio libre entre el conducto cístico y de la arteria cística o espacio libre dentro del triángulo). Es importante notar que la rapidez de ubicación y construcción de dicha ventana depende de la anatomía del paciente o de la complicación de su enfermedad biliar, además de la experiencia y pericia del cirujano. Para visualizar dicho triángulo y crear la ventana del conducto cístico, es necesario realizar movimientos de apertura y cierre sobre los conductos tratando de dilatar la zona y mejorar la visualización en el área de trabajo. Dicho proceso se lleva a cabo con un grasper que se introduce por la incisión marcada con la letra D en la Figura 2-3. En el momento que se obtenga buena visualización, se finaliza esta etapa (Figura 2-4).

Figura 2-4: Disección del conducto cístico[22]
2.2.1.3 Sección del conducto y la arteria císticos.
Ahora el conducto y la arteria están listos para ser seccionados (cortados), el conducto y la arteria se grapan con tres clips, tan cercanos como sea posible a la vesícula biliar. La idea es colocar dos clips a la derecha del conducto y uno a la izquierda (cercano a la vesícula), y luego cortar en un lugar del conducto ubicado en medio de los clips, el procedimiento es similar para la sección de la arteria (Figuras 2-5 y 2-6).
La colocación de los clips se hace con una pistola de endoclips mientras que el corte se realiza con una tijera quirúrgica, los dos procesos se realizan introduciendo los instrumentos por la incisión marcada con la letra D en la Figura 2-3.

Figura 2-5: Sección de conducto cístico[23]

Figura 2-6: Sección de conducto cístico[24]
2.2.1.4 Disección de la vesícula del lecho hepático.
Una vez se secciona el conducto y arteria, lo único que impide extraer la vesícula es que ésta se encuentra ligada al lecho hepático por una serie de adherencias. Se procede a disecar la vesícula del lecho hepático (despegar de la membrana del hígado). Para esto se utiliza un instrumento de electrocauterio que se introduce por la incisión D (Figura 2-2). El electrocauterio tiene la capacidad de disecar y cauterizar la sangre que produce la disección (Figura 2-7).
En la mayoría de los casos, esta disección generará humo que puede deteriorar la visualización del cirujano. Este humo puede ser aspirado abriendo el insuflador lateral del trocar.

Figura 2-7: Disección de la vesícula del lecho hepático[25]
2.2.1.5 Extracción de la vesícula biliar.
Finalmente se extrae la vesícula. Esta técnica de extracción depende de la complicación y alteraciones sufridas en la misma. Generalmente la extracción se realiza por la cánula del ombligo. Esta etapa no será seleccionada para generar trayectoria puesto que el procedimiento varia dependiendo de factores como cantidad de cálculos o tamaño de la inflamación y depende de la experiencia del cirujano y de las técnicas del grupo medico del quirófano.
2.2.2 Blender como herramienta de solución.
Como se mencionó anteriormente Blender es la herramienta que permitirá dar solución a los inconvenientes relacionados con construir trayectorias en base a los videos de cada cirugía. Específicamente la técnica de trabajo en Blender consistirá en capturar las coordenadas cartesianas de cada punto en el espacio, en cada instante durante los movimientos, y posteriormente construir la trayectoria en Matlab a partir de dichas posiciones.
La Figura 2-8 muestra el entorno de trabajo tridimensional en Blender.

Figura 2-8: Entorno de trabajo en Blender.
Resulta de gran utilidad poder enlazar las imágenes del video en Blender para visualizar los pasos de cada etapa, sin embargo como ya se mencionó en el inicio de el presente capítulo, no se puede tener una referencia fija porque la cámara está en constante movimiento, razón que dificulta seguir puntualmente el movimiento de cada instrumento.
Para tener una referencia se hace necesario el diseño y construcción del espacio de trabajo en Blender, es decir, tener un esquema de referencia de la vesícula y los conductos biliares que permita seguir los movimientos de los instrumentos quirúrgicos, pero esta vez, basados en posiciones fijas en el espacio. Con la ayuda del médico cirujano y aprovechando los recursos que brinda Blender, se diseñó un espacio de trabajo con las siguientes características:
Vesícula biliar, con centro en (0, 0, 0) y con las siguientes dimensiones:
8 cm en el eje X.
4 cm en el eje Y.
5 cm en el eje Z.
Conductos biliares, con las siguientes dimensiones:
4 cm en el eje X.
5 mm en el eje Y.
5 mm en el eje Z.
Con la idea de aproximar el espacio de trabajo a un entorno real, con la supervisión del cirujano, éste se modifica mediante procedimientos de extrusión y moldeamiento de la superficie, con lo que las anteriores longitudes se alteran y los valores se convierten en aproximaciones (Figuras 2-9 y 2-10).

Figura 2-9: Construcción espacio de trabajo en Blender en el plano X, Z.

Figura 2-10: Construcción espacio de trabajo en Blender en el plano X, Y.
Para simular el movimiento de los instrumentos quirúrgicos se crean dos objetos en Blender, estos objetos tienen una localización en el espacio. Las coordenadas en cada instante de esos cuerpos permitirán construir el recorrido, que será la trayectoria a seguir por el robot.
Finalmente mediante un programa se captura cada coordenada y se exporta a un archivo que será cargado desde Matlab, para visualizar los resultados.

Figura 2-11: Entorno de trabajo Blender y código
para exportar datos.
En la Figura 2-11 se puede apreciar como además de la vesícula, se tienen dos objetos que simularán la ubicación de los instrumentos. Además en la parte derecha se puede ver el código necesario para exportar las posiciones de los instrumentos. Para analizar el código ver Anexos.
2.2.3 Consignas obtenidas.
La primera trayectoria, está definida como disección del triángulo de Calot. Se requieren dos instrumentos quirúrgicos, uno encargado del agarre de la vesícula que notaremos como instrumento numero 2 (I.2, Figura 2-11) y otro destinado a la disección del triángulo que llamaremos instrumento 1 (I.1, Figura 2-11).
Para I.1, la trayectoria consta de 150 puntos, inicia en el punto con coordenadas (4, -0.6, -1.5), lugar mas próximo al conducto cístico. Es en ese sitio donde se realiza la primer apertura y cierre del instrumento quirúrgico, luego, se dirige en busca de la parte superior del conducto cístico para realizar la segunda acción de cierre y apertura, las coordenadas son (6,09 -0.03, -0.63).
A continuación el instrumento se traslada hacia el punto superior del triangulo de Calot, donde realiza una nuevo proceso de cierre y apertura, las coordenadas de este punto son (4.31, 0.44, -0.09). Finalmente el recorrido hace el último cierre apertura en un lugar superior a la arteria cística, acción que evidencia la ubicación de los conductos para la posterior sección de cada uno de ellos, las coordenadas del ultimo punto son (6, 1.4, 1).
La Figura 2-12 muestra la zona de trabajo en Blender sobre la cual se realiza el movimiento descrito anteriormente.

Figura 2-12: Triángulo de Calot en Blender.
De esta forma se capturan todos los puntos entre cada una de las acciones de cierre y apertura del instrumento quirúrgico, obteniendo como resultado la siguiente trayectoria (Figura 2-13).

Figura 2-13: Trayectoria disección triángulo
de Calot.
Como se observa en la figura 2-13, los puntos de color rojo indican el lugar donde se deben realizar las tareas de apertura y cierre de instrumento.
La segunda trayectoria está asociada a la tarea del instrumento I.2. Dentro de la etapa de disección de triángulo de Calot, el movimiento está definido por la tracción de la vesícula mientras I.1 realiza las tareas de las etapas 2, 3, 4.
En I.2 la trayectoria consta de 340 puntos, inicia en el punto con coordenadas (2.07, -1.85, -0.15), lugar en cual se agarra una fracción de vesícula y se tracciona (empuja) hasta el punto (1.19, -1.85, -2.01). Después se ubica la bolsa de Harttman en el punto (2.19, -1, -2.01), a partir de esta zona se realiza la segunda y ultima tracción, hasta el punto final con coordenadas (-0.65, -2.40, -2.5). Es importante notar que durante todo el procedimiento esta trayectoria puede repetirse las veces que sea necesario.
Los resultados obtenidos para esta trayectoria son los siguientes (Figura 2-14).

Figura 2-14: Trayectoria del segundo instrumento.
En la Figura 2-14 se observa la trayectoria de color rojo que debe seguir I.2, las líneas azules indican la dirección de la tracción que debe generarse para que las tareas quirúrgicas de I.1, se realicen con buena visualización y además permitan dilatar los tejidos, facilitando el corte de cada conducto.
De esta manera se finaliza la etapa de disección, y se inicia la etapa de corte del conducto y arteria císticos. En esta etapa I.2 repite la trayectoria las veces que sea necesario y la tarea de corte la realiza I.1.
La trayectoria consta de 70 puntos, e inicia cuando I.1 se dirige hacia la posición (6, 2, 2), que será el punto de referencia para el inicio y final de cada trayectoria. El primer clip se ubica sobre el conducto cístico en la posición (6.7,-0.25, -0.85). En este punto se acciona el instrumento para instalar el primer clip, luego éste debe ser recargado con otro clip por lo que vuelve a la posición inicial (6, 2, 2).
Es importante aclarar que esta recarga no se hace en el punto (6, 2, 2), este punto solo representa una referencia para el inicio y final de cada una de las trayectorias de esta etapa. Enseguida I.1 ingresa, pero ahora a la posición (5.15, -0.245, -0.85), lugar donde se instala el segundo clip, éste debe ser lo más próximo a la vesícula, Nuevamente el instrumento regresa al punto de referencia (6, 2, 2), luego es recargado y vuelve a colocar el tercer y último clip y más lejano a la vesícula en la posición (7, -0.25, -0.85).
El conducto cístico está listo para ser cortado o seccionado. Para esto I.1 sale pero esta vez la recarga no es un clip, ahora el elemento final de trabajo es una tijera que se dirige al punto de corte que es (6.1, -0.25, -0.85). Con el corte en este punto damos paso a la sección de la arteria cística.
Los resultados obtenidos para el procedimiento descrito anteriormente se presentan en la Figura 2-15.

Figura 2-15: Trayectoria corte conducto cístico.
En la Figura 2-15 se puede observar en rojo el punto de corte y en color azul los sitios donde deben ser instalados los clips a través del conducto cístico.
El procedimiento para el corte de la arteria cística es muy similar al corte del conducto, obviamente varían las posiciones, pero la técnica es semejante. De esta forma el primer clip es colocado en la posición (6.7, 1.2, 0.7), el segundo clip, que debe ser el más próximo a la vesícula en la posición (5.5, 1.2, 0.7) y el tercer y último clip se localiza en (7, 1.2, 0.7). Cuando los tres clips han sido colocados, se realiza el corte en el punto (6, 1.2, 0.7). Igualmente existe un punto de referencia, para el inicio y final de cada trayectoria.
Los resultados obtenidos del corte de la arteria cística se presentan en la figura 2-16.

Figura 2-16: Trayectoria corte arteria cística.
Cuando se cortan el conducto y la arteria císticos, lo único que impide extraer la vesícula es que ésta se encuentra ligada al lecho hepático (superficie del hígado) por una serie de adherencias. Por esta razón se cambia la tijera del órgano terminal por un electrocauterio en el instrumento I.1, este ingresa dirigiéndose al punto con coordenadas (3.76, 1.53, 1.362), simultáneamente I.2 realiza una leve tracción a la vesícula para facilitar la maniobra, es decir repite la trayectoria las veces que sea necesario. El electrocauterio empieza la disección siguiendo las líneas que forman la superficie de la vesícula, vale la pena resaltar que estas líneas son producto del proceso de extrusión. Blender permite ver la figura de la superficie vesicular sin su textura, y es de esta forma como siguiendo las líneas se garantiza que el proceso de la disección del lecho hepático tenga éxito. Las figuras 2-17, 2-18 y 2-19 muestran la vesícula sin su textura y el grupo de líneas que la conforman en el espacio, en el plano X-Z y X-Y respectivamente.
Hay que notar que la tarea de disección no se realiza sobre toda la superficie de la vesícula ya que ésta generalmente solo está adherida al hígado aproximadamente en una área de 12 a 16 cm2. Para nuestro caso de estudio el área de disección abarca los 16 cm2.

Figura 2-17: Vista vesícula biliar en el espacio
sin textura (vista 3D).

Figura 2-18: Vista vesícula biliar en el espacio
sin textura (plano X-Z).

Figura 2-19: Vista vesícula biliar en el espacio
sin textura (plano X-Y).
Finalmente después de 480 puntos de movimiento, el instrumento se ubica en la posición (3.4, -0.6, -0.75), con lo que la vesícula queda separada del hígado. El movimiento resultante de esta etapa se muestra en las figuras 2-20, 2-21 y 2-22 en el espacio, en el plano X-Z y X-Y respectivamente.

Figura 2-20: Trayectoria disección vesícula
del lecho hepático.

Figura 2-21: Trayectoria disección vesícula
del lecho hepático Plano X-Z.

Figura 2-22: Trayectoria disección vesícula
del lecho hepático Plano X-Y.
Tras realizar los pasos anteriores, la vesícula queda libre y puede ser extraída.
La última etapa (extracción de la vesícula) no fue seleccionada para la simulación puesto que el procedimiento varia dependiendo de factores como cantidad de cálculos o tamaño de la inflamación y su extracción depende del criterio del cirujano.
Considerando que todos los movimientos del instrumental quirúrgico durante una colecistectomía laparoscópica deben hacerse en una zona cercana a la vesícula y analizando las características de las consignas obtenidas, se condiciona que el diámetro mínimo de trabajo que debe cumplir el robot PUMA en su órgano terminal para realizar las etapas seleccionadas es aproximadamente 12 cm, a lo largo del plano X-Y y 6 cm en el plano X-Z (Figura 2-23). Se aclara que en la cirugía existen movimientos adicionales que exceden esos límites.

Figura 2-23: Espacio de trabajo colecistectomía laparoscópica.
2.3 CONSTRUCCIÓN DE LAS CONSIGNAS PARA BYPASS GÁSTRICO.
De igual manera que el procedimiento de colecistectomía laparoscópica, en el bypass, se realizará una descripción de la técnica quirúrgica, antes de abordar la obtención de las trayectorias. Cabe resaltar que la obtención y descripción de las trayectorias son similares al procedimiento anterior.
2.3.1 Técnica quirúrgica.
Generalmente el procedimiento quirúrgico se divide en 3 pasos o etapas.
1. Confección del reservorio gástrico.
2. Sección asa yeyunal.
3. Anastomosis yeyuno y reservorio gástrico.
Para ejecutar estas tareas debe tenerse en cuenta que se dispone de dos brazos robóticos los cuales realizarán las consignas obtenidas del análisis del instrumento que se introduce por las incisiones marcadas por la letra A y B (Figura 2-24) cuyo diámetro es 10 mm, las cuales son restricciones que tiene el robot para realizar estos movimientos.
Cabe aclarar que tanto el manejo de la cámara C, como las funciones de los instrumentos de las incisiones D y E, F serán hechas por auxiliares o asistentes humanos.

Figura 2-24: Disposición de los trocares en bypass
laparoscópico.
Se realizará la construcción de las consignas para la etapa 3, que como veremos mas adelante contiene una serie de subetapas a través de las cuales se obtendrán las consignas.
Confección del reservorio gástrico.
De variable longitud y grosor según algunos autores, en general se deja un reservorio (nuevo estómago) con una longitud menor de 6 cm, el cual da un volumen aproximado de 30 cm3. Habitualmente se realiza una sección horizontal en la parte superior del estómago de 3.5 cm, ubicando la comunicación con el esófago, preservando algunos nervios y vasos garantizando una optima vascularización del reservorio, ver Figura 2-25 [23].

Figura 2-25: Sección superior, creación de
reservorio gástrico[26]
Como se aprecia en la Figura 2-25 la idea es crear un nuevo estomago de menor tamaño.
Seccion asa yeyunal.
Despues de crear el reservorio, se secciona el yeyuno (intestino delgado) a unos 30 – 50 centimetros, comprobando que este punto llegue sin tensión al lugar donde está el extremo inferior del reservorio [23]. (Figura 2-26).

Figura 2-26: Sección asa yeyunal[27]
2.3.1.3 Anastomosis reservorio – yeyunal.
Ahora se realiza una anastomosis (conexión quirúrgica entre dos estructuras, en este caso reservorio-intestino), mediante una pistola de doble grapado de 21 mm. La cirugia finaliza comprobando que el nuevo reservorio gástrico esté totalmente cerrado. Esto se realiza mediante el ingreso de una sonda via oral para descartar algun tipo de filtración.

Figura 2-27: Anastomosis reservorio gástrico y yeyuno[28]

Figura. 2-28: Sutura a nivel yeyunal – reservorio
gástrico[29]
Posteriormente se garantiza la unión de los cuerpos mediante sutura disminuyendo así el riesgo de fugas y protegiendo la unión de posibles infecciones. Las figuras 2-27y 2-28 muestran el proceso de anastomosis y sutura respectivamamente.
Entonces la tercera etapa de anastomosis se divide en los siguientes pasos:
1. Suturar la union de los organos, reservorio y yeyuno en parte superior.
2. Suturar la union de los organos, reservorio y yeyuno en parte inferior.
3. Crear espacio para anastomosis.
1.Suturar la union de los organos, reservorio gastrico y yeyuno en parte superior.
En esta primera etapa se realiza una sutura en la parte superior de los organos garantizando la union, como se ve en Figura 2-29, Para esto se utiliza una aguja en curvatura que ingresa por el trocar A, y un retractor para mover el hilo este ingresa por el trocar B ver Figura 2-30.

Figura 2-29: Primera sutura
2.Suturar la union de los organos, reservorio gastrico y yeyuno en parte inferior.
En esta primera etapa se realiza una sutura en la la parte inferior de los organos garantizando la union, como se ve en Figura 2-30. Para esto se utiliza una aguja en curvatura que ingresa por el trocar A, y un retractor para mover el hilo este ingresa por el trocar B ver Figura 2-24.

Figura 2-30: Segunda sutura
3.Crear espacio para anastomosis.
Finalmente se debe crear el espacio para que el instrumento, realice la anastomosis, este instrumento es un electrocauterio, e ingresa por el trocar A, en la Figura 2-24, trocar por el que tambien ingresa la pistola de endoclip para realizar el proceso de anastomosis, momento en que se da por terminado el procedimiento. El espacio para la anastomosis se puede ver en la Figura 2-31.

Figura 2-31: Espacio para anastomosis.
2.3.2 Obtencion de las consignas.
De igual manera que en la obtención de las trayectorias en la colecistectomia, Blender será la herramienta para obtener los movimientos del elemento final en el bypass gástrico laparoscópico.
Nuevamente la idea es crear un espacio de trabajo que sirva como referencia para cada movimiento en las tareas quirúrgicas de cada etapa. En este caso se crean dos cuerpos que simularán a una fracción de yeyuno y reservorio. De manera similar mediante las utilidades de Blender se unen estos dos cuerpos para dar una idea más real del espacio de trabajo. La Figura 2-32 muestra el nuevo espacio.

Figura 2-32: Espacio de trabajo en Blender bypass gástrico.
En la Figura 2-32 se observan los dos cuerpos unidos por una linea de sutura en color rojo, que será el sentido que deberá llevar la trayectoria de sutura.
Las dimensiones de los cuerpos son las siguientes:
Con centro en (0, 0, 0), para el yeyuno (intestino delgado), su diámetro es aproximadamente 5 cm y se aprecia en el plano X-Z , su longitud es de 7 cm y está a lo largo del eje Y. Se debe aclarar que solo está un segmento del intestino delgado.
Para el nuevo estómago, el diámetro es de 4 cm y de igual forma se observa en el plano X-Z que la longitud es de 6 cm a lo largo del eje Y.
Los movimientos obtenidos serán los de los dos instrumentos a los cuales se notarán I.1 e I.2.
La etapa inicia con una primera sutura en la parte superior de los dos cuerpos a lo largo del eje Y. I.1 con aguja en curvatura, para facilitar el ingreso al estómago, inicia el recorrido en el punto con coordenadas (-1.45, 4.4, 1.5) y finaliza en el punto (1.4, 4.4, 1.28), asegurando que la aguja durante su recorrido una a los dos cuerpos. Línea de color azul entre puntos de color rojo en la Figura 2-33.
A continuación I.2 inicia en (1.5, 4.4, 1.28), toma la parte inicial de hilo y la lleva al punto (3, 4.4, 1.28). Línea de color verde en la Figura 2-33.
Para realizar el nudo la técnica es la siguiente:
I.1 que se encuentra en la posición (1.4, 4.4, 1.28), se dirige a la posición (0, 4.4, 1.5), sitio en donde espera el accionar del instrumento I.2.
Por su parte I.2 se dirige de (3,0 4.4, 1.28) al punto (-1, 3.4, 1.45), asegurándose de que el movimiento sea por la parte superior de I.1. La razón de este movimiento es abrir espacio para el nudo. Línea de color negro entre punto verde y amarillo en la Figura 2-33.
Ahora I.1 se desplaza a (-1.4, 4.4, 2). Vale la pena resaltar que este movimiento genera una acción de trayectoria pasiva en el hilo que lleva I.1, es decir existe desplazamiento del hilo y no del instrumento. Línea de color azul entre punto de color rojo y amarillo en la Figura 2-33. De igual manera el movimiento pasivo se puede observar en líneas punteadas en color negro en la Figura 2-33.
Finalmente I.1 tracciona (empuja) desde el punto (1.4, 4.4, 1.28), al (1.4, 4.4, 1.28), e I2 del punto (1.4, 4.4, 1.28), al (1.4, 4.4, 1.28), para cerrar el nudo.
Esta tracción debe ser simultánea para dar total firmeza. La dirección de esta tracción se muestra con flechas de color rojo en la Figura 2-26.
En este momento se finaliza el procedimiento para realizar el primer nudo en la etapa de anastomosis. Para esta primera sutura son necesarios tres nudos, razón por la cual el proceso descrito anteriormente se repite tres veces.
La Figura 2-33 representa las trayectorias obtenidas en el proceso de sutura en el bypass gástrico.

Figura 2-33: Trayectoria primer sutura bypass gástrico.
La segunda trayectoria a obtener es la sutura en la parte inferior de los cuerpos a lo largo del eje Y. Esta tarea se realiza 4 cm por debajo de la primera sutura, básicamente el procedimiento es similar al primero, pero en este caso cambian las posiciones.
La figura 2-34 muestra la segunda sutura teniendo como referencia la primera.

Figura 2-34: Trayectoria segunda sutura bypass gástrico.
En la Figura 2-34 se observa de color azul la primer sutura y de color rojo la segunda.
La siguiente tarea consiste en abrir dos orificios sobre la superficie de los órganos a unir, el nuevo reservorio gástrico y el intestino delgado
El instrumento encargado de realizar los orificios es un electrocauterio (ver sección 1.3.3.4). El primer y segundo, se realizan sobre la superficie de cada uno de los órganos, con un diámetro de 1 cm, además deben estar entre la primer y segunda sutura. Vale la pena resaltar que la superficie de los cuerpos se representa en el plano X-Y.
El tercer y cuarto orificios se efectúan de igual manera, uno en cada órgano, con mismo centro, pero esta vez su diámetro es de 5 mm y con una profundidad de 2 cm, es decir 2 cm menos en el eje Z. Estos círculos permitirán la entrada del instrumento que realiza la anastomosis a cada unos de los órganos a unir. Ver círculos de color verde en la Figura 2-35.
El procedimiento de anastomosis no tiene trayectoria, ya que se trata de una acción de cierre y apertura entre los orificios ya mencionados.
La figura 2-35 muestra la ubicación de los orificios, para el proceso de anastomosis.

Figura 2-35: Ubicación orificios para anastomosis
en bypass gástrico.
Después de realizar los círculos el instrumento ingresa por cada uno de ellos y realiza el procedimiento de anastomosis, esta acción se puede ver en la figura 2-31. Una vez hecha la unión de los cuerpos se procede a realizar una serie de suturas a consecuencia del espacio generado en la anastomosis.
Ahora se efectúan 3 suturas más entre la primera y la segunda ya realizadas. Es decir las siguientes trayectorias son similares a las ya obtenidas, pero esta vez serán realizadas entre la trayectoria de color azul y de color rojo de la figura 2-35.
Así pues se mostrarán los resultados para una tercera sutura ya que las dos suturas restantes se realizan de igual manera.
La Figura 2-35 muestra la trayectoria obtenida, que representa la tercera sutura de la etapa de anastomosis yeyuno- reservorio gástrico.

Figura 2-36: Trayectorias de sutura finales, anastomosis
bypass gástrico.
La trayectoria de color negro, representa la tercera sutura. Se observa que ésta se encuentra entre las dos primeras, en color azul y rojo, trayectorias elaboradas anteriormente. Todas las trayectorias, obtenidas en este capítulo se especifican para un caso particular, y están bajo el criterio del médico cirujano Jair Cerón Lazo, egresado de la Universidad del Cauca.
Considerando que todos los movimientos del instrumental quirúrgico durante el bypass gástrico laparoscópica, se condiciona que el diámetro mínimo de trabajo que debe cumplir el robot PUMA en su órgano terminal para realizar las etapas seleccionadas es aproximadamente 7 cm, a lo largo del plano X-Y y 5 cm en el plano X-Z (Figura 2-36).

Figura 2-37: Espacio de trabajo bypass gástrico
laparoscópico.
Robótica, descripción y modelado del robot puma para cirugías de laparoscopía
3.1 ROBÓTICA EN LAPAROSCOPIA
Durante las ultimas tres décadas la robótica ha tenido una gran presencia en la industria, especialmente en la industria del automóvil y la industria electrónica que han copado el 70% del parque de robots en el mundo [27].
En los últimos años han aparecido nuevas áreas de la aplicación de la robótica, que se han agrupado bajo la denominación de la robótica de servicios. Esta clase de robots se caracterizan por acercarse al ciudadano para realizar tareas de tipo doméstico y profesional, apareciendo en sectores como limpieza, cirugía de la rehabilitación, y medicina.
Precisamente en este último sector se encuentra el área de la Robótica Médica, y es donde aparecen los denominados robots para asistencia quirúrgica.
El termino cirugía asistida por computador (CAS: Computer Aided Surgery) [27], se asimila fácilmente partiendo del termino Diseño Asistido por Computador (CAD). Es decir CAS es la tecnología de simulación quirúrgica usando herramientas tridimensionales, para reconstruir modelos de órganos y simular procedimientos quirúrgicos a través de un computador.
De esta manera aparece toda una generación de métodos de cirugía usando técnicas tales como la robótica y la realidad virtual. El CAS cubre:
Planificación de operaciones.
Procesamiento y visualización de imágenes médicas.
Simulación quirúrgica empleando información visual que pueda optimizar el proceso de operación.
Ensayos de operación a través de simuladores.
Medida y posicionamiento de herramientas.
Diseño de prótesis.
En muchas de estas técnicas tiene cabida y es de vital importancia el empleo de robots, los cuales facilitan enormemente el trabajo de las personas y la calidad de vida del paciente.
Actualmente se pueden clasificar los robots para asistencia quirúrgica existentes en cuatro categorías [28]:
Robots teleoperados para operaciones de mínima invasión: son robots con control a distancia en el quirófano, dirigidos por voz u otros dispositivos para una manipulación maestra, es decir los robots no trabajan de forma autónoma. Normalmente realizan la función de mover la cámara endoscópica y en algunos casos mueven el instrumental.
Robots autónomos: se emplean en tareas de corte y taladrado, por ejemplo en cirugías de sustitución de cadera. En este tipo de tares en caso de existir algún inconveniente el robot se detiene de inmediato.
Robots de investigación interactiva: son herramientas de soporte que cargan, mueven y guían herramientas médicas.
Micro maquinas: son robots pequeños dedicados a tareas especiales tales como cosido automático, empalme de venas y disecciones automáticas.
A continuación se describen algunos desarrollos de robots de asistencia en la cirugía.
Da Vinci
Con Da Vinci el cirujano controla por medio de una consola el brazo robótico que sostiene los instrumentos robóticos. El cirujano se encuentra sentado frente a un computador el cual reproduce una imagen de alta resolución, en tres dimensiones, del campo operatorio. Cada movimiento que realiza el cirujano es transmitido en tiempo real al robot, quien los reproduce con la flexibilidad y exactitud necesarias. Este robot es desarrollado por la empresa Intuitive Surgical Inc, de Estados Unidos [28].
Robodoc
El Robodoc es especialista en cirugías de cadera. Este es un robot mucho más difundido que el Da Vinci. La precisión que consigue el robot es del 95%, muy superior al limado a mano de cualquier hueso, en este caso específico el fémur.
Además de protagonizar la ejecución de la operación, el robot y el computador son las piezas indiscutibles en las sustituciones de cadera, en el momento de diseñar la prótesis y de prever mediante un simulacro virtual el resultado definitivo. Este robot es fabricado por la empresa Integrated Surgical Systems Inc, de Estados Unidos [27].
Hermes
Hermes, debutó en California (Estados Unidos), donde se realizó la primera cirugía con un equipo computarizado comandado por voz. Fue usado para unir los ligamentos de la rodilla de un paciente. Los comandos de voz deben ser modulados correctamente y con palabras precisas, el robot reconoce solo 100 órdenes que le permiten por ejemplo, activar la cámara y la luz que capturan las imágenes dentro del paciente.
Son muchas las ventajas que brindan estos asistentes. Algo que aún resta por solucionar es el elevado costo que restringe su mercado: los precios de estos robots fluctúan entre cien mil y un millón de dólares [28].
3.2 DESCRIPCION DEL PASO POR EL TROCAR
Un aspecto importante al realizar el modelado de un robot para cualquier cirugía de laparoscopia, es la del paso del brazo robótico por el trocar. En una cirugía real, el trocar es un instrumento cilíndrico que sirve para guiar el instrumento quirúrgico al interior del abdomen, con el fin de limitar el movimiento de la herramienta y proteger al paciente. El diámetro del trocar oscila entre 5 y 12,5 mm dependiendo el procedimiento que se realice.
Para efectos de simulación se considerará como prioridad la entrada por el borde superior del trocar. Debido a la flexibilidad que presenta el tejido adiposo que recubre el abdomen, el trocar se mueve en conjunto con el instrumento quirúrgico o el brazo robótico respetando el punto inmóvil que garantiza la integridad de la epidermis del paciente, como lo ilustra la Figura 3-1 en la que las líneas continuas y punteadas representan el cambio de posición tanto del robot como del trocar. Así la restricción se encuentra en el punto de contacto del robot con la epidermis del paciente.

Figura 3-1: Paso por el trocar.
Por tanto cualquier trayectoria que se realice al interior del paciente, debe respetar el punto inmóvil que se genera en la pared abdominal, como lo muestra la Figura 3-2.

Figura 3-2: Movimiento del brazo robótico al interior
de la cavidad abdominal.
3.3 ROBOT PUMA DE 6 GRADOS DE LIBERTAD
El robot PUMA (Programmable Universal Machine for Assembly), es un robot industrial que introdujo UNIMATION en 1978 para tareas de montaje industrial, basándose en diseños obtenidos en un estudio de General Motors, convirtiéndose desde entonces en uno de los robots más populares dentro de la industria (Figura 3-3) [29] [30].
Es un portador antropomorfo de seis grados de libertad, con seis articulaciones rotoides, tres en el brazo y tres en la muñeca de ejes concurrentes (Figura 3.4), cada articulación tiene un motor de corriente continua. El voltaje aplicado a cada motor se manifiesta en la articulación como un torque que produce el movimiento del elemento correspondiente.
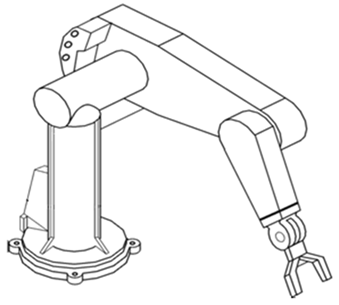
Figura. 3-3: Robot PUMA.

Figura. 3-4: Muñeca robot PUMA.
Con el fin de expresar las diferentes situaciones de cualquier robot, simular su dinámica y su comportamiento, es necesario basarse en la construcción de modelos que permitan diseñar las estrategias de control mediante las cuales se logre un funcionamiento determinado del robot.
3.3.1 Tabla de parámetros del robot PUMA.
Para obtener los modelos geométricos del robot, es necesario encontrar una serie de parámetros para cada articulación, que dependen de los ángulos y las distancias entre los ejes de las articulaciones del robot PUMA, los cuales se muestran en la Figura 3-5. Tras analizar las características del robot, se obtiene la tabla de parámetros geométricos respectiva (Tabla 3-1) [31].
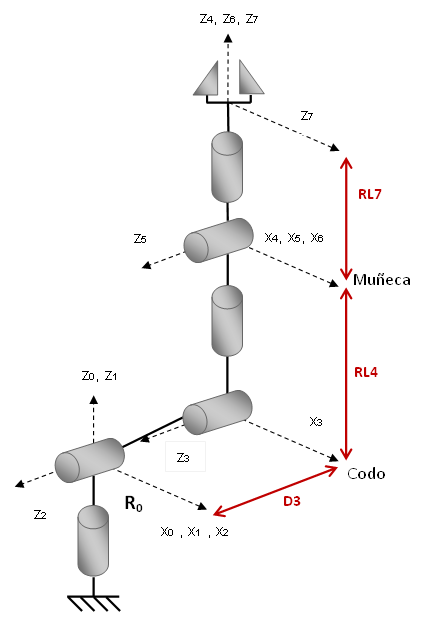
Figura 3-5: Robot PUMA, articulaciones y ejes.

Tabla 3-1: Tabla de parámetros del robot PUMA.
Donde:
j: Es la articulación j.
sj: 0 si la articulación es rotoide, 1 si es prismática.
aj: Angulo entre los ejes zj-1 y zj correspondiente a una rotación alrededor del eje xj.
dj: Distancia entre los ejes zj-1 y zj a lo largo del eje xj.
?j: Angulo entre los ejes xj-1 y xj correspondiente a una rotación alrededor del eje zj.
rj: Distancia entre xj-1 y xj a lo largo de zj.
3.3.2 Modelo geométrico directo robot PUMA (MGD).
El modelo geométrico directo permite expresar la posición y orientación del órgano terminal en función de sus coordenadas articulares, y se obtiene mediante la matriz de transformación (3.1) la cual determina la situación de una articulación respecto a la anterior.

3.3.3 Robot PUMA y el paso por el trocar.
Como muestra la Figura 3.5, el robot PUMA está compuesto por un brazo D3, un antebrazo RL4 y en la muñeca el instrumento quirúrgico RL7.
Se busca que las tres primeras articulaciones posicionen el órgano terminal, ubicándose fuera del paciente, y que las articulaciones restantes den la orientación dentro de la cavidad abdominal, como lo ilustra la Figura 3.6. Así D3 no tiene contacto con el paciente, RL4 pasa por el trocar y la muñeca al igual que RL7 están al interior del abdomen.
De esta forma las condiciones que se imponen en este trabajo al robot para actuar en las etapas seleccionadas para una colecistectomía y un bypass gástrico laparoscópicos son:
El espacio mínimo de trabajo en el órgano terminal planteado en la obtención de las consignas para cada cirugía, secciones 2.23 y 2.32.
El cruce por un punto inmóvil que representa el trocar, sección 3.2.
El eslabón encargado de realizar el paso por el trocar, es el antebrazo RL4.
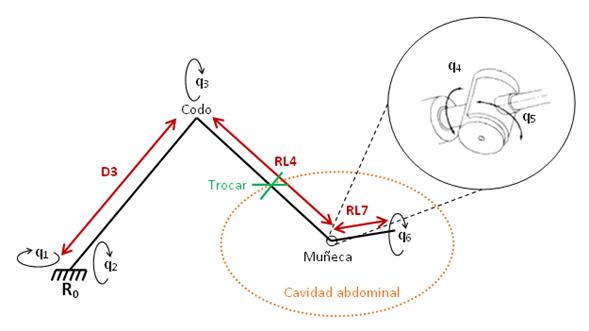
Figura 3-6: Robot PUMA y la cavidad abdominal.
3.3.4 Visualización del robot PUMA.
Para graficar el robot y analizar los resultados, es necesario conocer
las posiciones de las articulaciones y de los eslabones D3, RL4 y RL7 del robot
respecto al marco de referencia de origen R0.

3.3.5 Expresión matemática de la restricción.
Con el fin de cumplir con la restricción del paso por el trocar planteada en el numeral 3.2, se deben considerar una serie de variables que permitan al robot PUMA realizar el cruce por el punto inmóvil en contacto con la piel. El problema lo ilustra con mayor claridad la Figura 3-7.

Figura 3-7: Comportamiento del robot PUMA ante el cruce
por el trocar.

En la Figura 3.5 se puede ver que D3 va desde el origen R0 hasta
el codo ![]()
La distancia entre estos dos puntos esta definida por:

El análisis realizado y las ecuaciones obtenidas se basan en el desarrollo de la tesis de doctorado "Contribution à la commande de robots pour la chirurgie mini-invasive" realizada por Micaël Michelin de la Universidad de Montpellier, Francia [32][33][34].
3.3.6 Proceso de optimización.
Se tiene un sistema de 7 ecuaciones con seis incógnitas, que son las posiciones del codo y de la muñeca, que se representan así [32]:


Figura 3-8: Esquema de optimización.
Se obtienen las posiciones optimizadas del codo (Figura 3-9) y las posiciones optimizadas de la muñeca (Figura 3-10), que realizan una trayectoria respetando el trocar (Figuras 3-11 y 3-12).


Figura 3-12: Resultados de optimización (vista 3D).
3.3.7 El MGI modificado del robot PUMA.
Para que el robot PUMA pueda realizar la consigna deseada siguiendo las nuevas posiciones de codo y muñeca obtenidas en optimización, es necesario encontrar un modelo geométrico inverso que encuentre los ángulos de las articulaciones teniendo en cuenta las posiciones del codo y de la muñeca. Se aclara que no es necesario encontrar la sexta articulación puesto que el movimiento que ésta induce es solo rotacional en el mismo eje de RL7 y no genera un cambio de posición en el extremo del robot.
Cálculo de q1 y q2
Considerando como marco de referencia los ejes de la tierra o el punto fijo del robot R0, la posición del codo depende solamente de  y
y  y de la longitud del brazo D3, como muestra la Figura 3-13.
y de la longitud del brazo D3, como muestra la Figura 3-13.

 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |